Der Aufbau von Servomotoren
Servomotoren bestehen neben dem Gehäuse im wesentlichen aus vier Teilen,einem Motor, einem Getriebe, einem Potentiometer und der Servoelektronik.
Wie funktionieren Servomotoren?
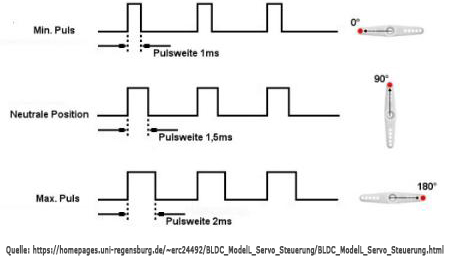
Das Potentiometer ist an der Endachse des Getriebes befestigt, also an der Achse, die auch den Servoarm oberhalb des Servos bewegt. Je nach dem, wie weit der Servoarm also gedreht ist, hat das Potentiometer einen hohen Widerstand oder einen niedrigen. Durch auslesen des aktuellen Widerstandes des Potentiometers kann man nun Rückschlüsse auf die Position des Servoarmes ziehen. Kommt ein PWM-Signal an der Servoelektronik an, wandelt diese das Signal in eine Gleichspannung um. Diese wird nun mit der Spannung verglichen, die am Potentiometer anliegt. Bei hohem Widerstand ist dies eine Hohe und bei niedrigem Widerstand eine Niedrige. Stimmen die Werte überein befindet sich der Servomotor in der richtigen Position. Stimmen diese Werte nicht überein setzt die Elektronik den Motor in Gang, der nun über das Getriebe die Endachse dreht. Mit der Endachse dreht sich auch das Potentiometer und somit ändert sich auch die Spannung. Sobald nun die Potentiometerspannung mit der aus dem PWM-Signal ermittelten Spannung übereinstimmt wird der Motorangehalten und hat den gewünschten Winkel erreicht und hält diesen.
Anschlüsse von Servomotoren
Servomotoren besitzen ein Anschlusskabel mit 3 Pins, meistens in den Farben Schwarz, Rot und Weiß. Schwarz und Rot sind dabei die Anschlüsse für GND und +5V und Weiß die Datenleitung über die das PWM-Signal vom Servomotor übertragen wird. Es gibt außerdem noch Servomotoren, die über einen vierten Feedback-Pin verfügen, um die Position über einen Microcontroller wie z.B. einen Arduino abzufragen.
Verwendung von Servomotoren
Servomotoren sind aufgrund ihrer einfachen Steuerung und Präzision zum Beispiel im Modellbau besonders beliebt. Wegen der hohen Zuverlässigkeit im Vergleich zu Drehspulinstrumenten wird diese Art von Motoren sogar bei Anzeigegeräten im Flugwesen und auch beim Militär eingesetzt. Egal ob für Aufgaben mit großem oder geringem Kraftaufwand, es finden sich zu jeder Anwendung passende Servomotoren.